کانال تلگرام گروه فنی و مهندسی پندار

+ نوشته شده در ساعت توسط editpaper
مقاله شبیه سازی شده
کد پروژه: 1066
موضوع: الکترونیک
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab
عنوان مقاله:
A Graphene nanoribbon field-effect transistor Modeling Integrated system technology
آدرس: researchgate
دانلود: PDF
خلاصه:
ABSTRACT:
We present an analytical device model for a field-effect transistor based on a heterostructure which consists of an array of nanoribbons clad between the highly conducting substrate (the back gate) and the top gate controlling the source-drain current. The equations of the model of a graphene nanoribbon field-effect transistor (GNR-FET) include the Poisson equation in the weak nonlocality approximation. Using this model, we find explicit analytical formulas for the spatial distributions of the electric potential along the channel and for the GNR-FET current-voltage characteristics (the dependences of the source-drain current on the drain voltages as well as on the back gate and top gate voltages) for different geometric parameters of the device.
مقاله شبیه سازی شده
کد پروژه: 1065
موضوع: الکترونیک
شامل:کتاب اصلی 419 صفحه+ فایل شبیه سازی تمامی اشکال با نرم افزار متلبMatlab
عنوان کتاب:
Quantum Transport: Atom to Transistor
Supriyo Datta
آدرس: cambridge
مشخصات: Quantum Transport
دانلود: PDF
![]()
خلاصه:
ABSTRACT:
This book presents the conceptual framework underlying the atomistic theory of matter, emphasizing those aspects that relate to current flow. This includes some of the most advanced concepts of non-equilibrium quantum statistical mechanics. No prior acquaintance with quantum mechanics is assumed. Chapter 1 provides a description of quantum transport in elementary terms accessible to a beginner. The book then works its way from hydrogen to nanostructures, with extensive coverage of current flow. The final chapter summarizes the equations for quantum transport with illustrative examples showing how conductors evolve from the atomic to the ohmic regime as they get larger. Many numerical examples are used to provide concrete illustrations and the correspondingMatlab codes can be downloaded from the web. Videostreamed lectures, keyed to specific sections of the book, are also available through the web. This book is primarily aimed at senior and graduate students.
AUTHOR
Supriyo Datta is the Thomas Duncan Distinguished Professor in the School of Electrical and Computer Engineering at Purdue University. He is also the Director of the NASA Institute for Nanoelectronics and Computing. He shared the IEEE Cledo Brunetti award in 2001 and is a Fellow of the IEEE, the American Physical Society (APS), and the Institute of Physics (IOP). He has written three other books.
Reviews & endorsements
'Molecular transport phenomena in junctions is a very 'hot' area, that is best understood in terms of quantum transport phenomena in general. This book, by one of the true leaders in this field, presents and clarifies molecular transport in the context of the larger quantum transport area. The text is lucid, masterful, understandable and unified. The numerical examples and MATLAB codes combine with the discussions to provide a strongly integrated and very readable overview of the field.' Mark Ratner, Northwestern University
'A lucid treatment of what's destined to be the 'next big thing' for electrical engineers - conduction at the atomic scale - eminently suitable for students and professionals alike. The generous use of examples and clarifying remarks, together with the novel approach of sequentially building up transport theory from the 'bottom up' and a genuine flair for effortlessly bringing together salient aspects of physics and engineering makes this a very useful book, indeed.' Steve Laux, IBM, Yorktown Heights
'In recent years, scientists have developed a powerful practical technique based on Green function methods for calculating transport through small open systems. Supriyo Datta is one of its leading exponents and his new textbook makes a valiant and fascinating effort to use the formalism to provide a simple exposition of quantum transport on the atomic scale … It is more accessible, more embracing and a much better read than his earlier monograph Electronic Transport in Mesoscopic Systems. It contains excellent examples, good breadth and progressive detail, and is of real value to electronic engineers, physicists, and chemists researching modern interdisciplinary nanoelectronics.' Chemistry World
مقاله شبیه سازی شده
کد پروژه: 1055
موضوع:شبکه عصبی
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab +گزارش کامل از خلاصه ای از مقاله و نتایج شبیه سازی
عنوان مقاله:
A real-time learning control approach for nonlinear continuous-time system using recurrent neural networks
آدرس:IEEE
خلاصه:
Abstract
In this paper, a real-time iterative learning control (ILC) approach for a nonlinear continuous-time system using recurrent neural networks (RNNs) with time-varying weights is presented. Two RNNs are utilized in the ILC system. One is used to approximate the nonlinear system and another is used to mimic the desired system response. The ILC rule is obtained by combining the two RNNs to form a neural network control system. Also, a kind of iterative RNNs training algorithm is developed based on the two-dimensional (2-D) system theory. An RNN using the proposed 2-D training algorithm is able to approximate any trajectory to a very high degree of accuracy. Simulation results show that the proposed ILC approach is very efficient. The newly developed 2-D RNNs training algorithms provides a new dimension to the application of RNNs in a nonlinear continuous-time system
مقاله شبیه سازی شده
کد پروژه: 1044
موضوع: کنترل فازی Fuzzy Control
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab + گزارش شبیه سازی Word
عنوان مقاله:
شبیه سازی کنترلر فازی سیستم گوی و میله
مقاله شبیه سازی شده
کد پروژه: 1027
موضوع: کنترل فازی Fuzzy Control
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab + گزارش شبیه سازی Word و فایل ارائه پاورپوینت PPT
عنوان مقاله:
تشخیص خودکار مراحل خواب انسان با استفاده از جدول جستجوی فازی
Address:civilica
خلاصه مقاله:
نياز به استفاده اهز روشي هوشمند در تشخيص خودكار مراحل خواب در بسياري از كاربردهاي روانشناسي و پزشكي اهميت ويژه اي دارد دراين تحقيق با پياده سازي جدول جستجوي فازي روشي جديد و با دقت بالا در تشخيص مراحل خواب ايجاد نموده ايم استخراج قوانين فازي با استفاده از ويژگيهايي كه از اسپكتروگرام داده هاي EEG,EOG بدست آمده و همچنين توجه به مرحله قبلي خواب، امكان تشخيص مراحل خواب را در داده هاي تست تا پيش از 96% بوجودآورده است ضمن آنكه تشخيص صورت گرفته در 100% موارد صحيح بوده است و اين بيشترين دقت در بين تحقيقات مشابه مي باشد.
كلمات كليدي:
تشخيص خودكار مراحل خواب، اسپكتروگرام، جدول جستجوي فازي
مقاله شبیه سازی شده
کد پروژه: 1026
موضوع: کنترل فازی Fuzzy Control
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab
عنوان مقاله:
Temperature prediction based on fuzzy clustering and fuzzy rules interpolation techniques
پیش بینی دمای هوا براساس خوشه بندی فازی و تکنیکهای درونیابی قواعد فازی
Address: ieeexplore
ABSTRACT
In this paper, we present a new method to deal with temperature prediction based on fuzzy clustering and fuzzy rules interpolation techniques. First, the proposed method constructs fuzzy rules from training samples based on the fuzzy C-Means clustering algorithm, where each fuzzy rule corresponds to a cluster and the linguistic terms appearing in the fuzzy rules are represented by triangular fuzzy sets. Then, it performs fuzzy inference based on the multiple fuzzy rules interpolation scheme, where it calculates the weight of each fuzzy rule with respect to the input observation based on the defuzzified values of triangular fuzzy sets. Finally, it uses the weight of each fuzzy rule to calculate the forecasted output. We also apply the proposed method to handle the temperature prediction problem. The experimental result shows that the proposed method gets higher average forecasting accuracy rates than Chen and Hwang's method.
مقاله شبیه سازی شده
کد پروژه: 1025
موضوع: کنترل بهینه Optimal Control
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab
عنوان مقاله:
Modelling and Simulation for Optimal Control of Nonlinear Inverted Pendulum Dynamical System Using PID Controller and LQR
Address: ieeexplore
Download: PDF
This paper presents the modelling and simulation for optimal control design of nonlinear inverted pendulum-cart dynamic system using Proportional-Integral-Derivative (PID) controller and Linear Quadratic Regulator (LQR). LQR, an optimal control technique, and PID control method, both of which are generally used for control of the linear dynamical systems have been used in this paper to control the nonlinear dynamical system. The nonlinear system states are fed to LQR which is designed using linear state-space model. Inverted pendulum, a highly nonlinear unstable system is used as a benchmark for implementing the control methods. Here the control objective is to control the system such that the cart reaches at a desired position and the inverted pendulum stabilizes in upright position. The MATLAB-SIMULINK models have been developed for simulation of control schemes. The simulation results justify the comparative advantages of LQR control methods.
مقاله شبیه سازی شده
کد پروژه: 1024
موضوع: کنترل فازی Fuzzy Control
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab +گزارش کامل از خلاصه ای از مقاله و نتایج شبیه سازی
عنوان مقاله:
Optimal Control with Fuzzy state space Modeling using Riccati Equation
دانلود: PDF
نام ژورنال یا کنفرانس مربوط به مقاله:
International Journal of Information and Electronics Engineering
Abstract
Fuzzy logic has a boon for nonlinear controlsystems. Normal fuzzy logic control with a proportional integral – Derivative (PID) controller is common. Controlsystems can be defined through transfer functions and state-space. relations for linear systems. Optimal control to meet aperformance index is possible only through State Spaceanalysis. Optimal control in state space is centered around theRiccati Equation with state variable functions that has to besolved to yield the control law or trajectory. In the controlscheme of an ozone generator, optimal control with aperformance index had to be implemented. The method forfinding the control functions by solving the equationgraphically is described. The data is used for realizing anembedded control scheme for the generator
Index Terms
Fuzzy control, neuro-fuzzy systems, fuzzysystem model, process control
مقاله شبیه سازی شده
کد پروژه: 1023
موضوع: رباتیک
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab +گزارش کامل از خلاصه ای از مقاله و نتایج شبیه سازی
عنوان مقاله:
An iterative learning control of Robot Manipulators
Address: ieeexplore
Abstract:
An iterative learning scheme comprising a unique feedforward learning controller and a linear feedback controller is presented. In the feedback loop, the fixed-gain PD controller provides a stable open neighborhood along a desired trajectory. In the feedforward path, on the other hand, a learning control strategy is exploited to predict the desired actuator torques. It is shown that the predicted actuator torque converges to the desired one as the iteration number increases. The convergence is established based on the Lyapunov stability theory. The proposed learning scheme is structurally simple and computationally efficient. Moreover, it possesses two major advantages: the ability to reject unknown deterministic disturbances and the ability to adapt itself to the unknown system parameters
مقاله شبیه سازی شده
کد پروژه: 1022
موضوع:کنترل فازی Fuzzy Control
شبیه سازی کنترلر فازی سیستم پاندول معکوس
شامل:فایل شبیه سازی با نرم افزار متلبMatlab و گزارش شبیه سازی Word
خلاصه:
سیستم پاندول معکوس که یکی از سیستمهای پایه برای مهندسی کنترل است را در نرم افزار متلب پیاده سازی کرده سپس توسط یک کنترلر فازی سیستم را کنترل کردیم.برای آزمایش پایداری سیستم یک اغتشاش به آن وارد کرده و مشاهده میکنیم که سیستم پایدار است.
مقاله شبیه سازی شده
کد پروژه: 1021
موضوع:کنترل فازی Fuzzy Control
شبیه سازی کنترلر فازی سیستم پاندول معکوس به همراه اغتشاش وبهبود پایداری سیستم
شامل:فایل شبیه سازی با نرم افزار متلبMatlab و گزارش شبیه سازی Word
خلاصه:
سیستم پاندول معکوس که یکی از سیستمهای پایه برای مهندسی کنترل است را در نرم افزار متلب پیاده سازی کرده سپس توسط یک کنترلر فازی سیستم را کنترل کردیم.برای آزمایش پایداری سیستم یک اغتشاش به آن وارد کرده و مشاهده میکنیم که سیستم پایدار است.
مقاله شبیه سازی شده
کد پروژه:1036
موضوع:
کنترل بهینه
شامل:
مقاله اصلی + فایل Word ترجمه و PowerPoint ارائه + شبیه سازی با مایکروسافت ویژوال C + + 2008 و دارای فیلم Demo طریقه کار با محیط نرم افزار شبیه سازی
عنوان مقاله:
A Bi-level Programming Model for Network Traffic Surveillance of Optimal Camera Location
آدرس:
EndNote
X.-S. Lu, et al., "A Bi-level Programming Model for Network Traffic Surveillance of Optimal Camera Location," in Computational Sciences and Optimization (CSO), 2011 Fourth International Joint Conference on, 2011, pp. 1035-1039.
Abstract
Cameras enable synthesis of disaggregated vehicle information from multiple locations. This paper addresses the problem of how to determine the optimal locations of cameras for best traffic surveillance in urban road networks. All users are divided into multiple classes according to their own acceptance degree of camera monitoring (ADOCM). A bi-level programming model for camera location problem (CLP) is introduced. The objective of upper level problem is to maximize the total observed traffic flow from the viewpoint of network planners. The lower level problem is to depict the logit-based stochastic route choice behavior of users. The method of successive averages (MSA) and Frank Wolfe algorithm are employed to solve the problem. Numerical examples show the managerial insight that the behavior against camera monitoring has brought considerable loss to network traffic surveillance.
Keywords
bi-level programming; camera location; traffic surveillance; multiclass; stochastic user equilibrium
چکیده
دوربین های دیجیتال قادر به سنتز تفکیک اطلاعات خودرو از مکان های مختلف هستند.این مقاله، در مورد مشکل چگونگي تعیین محل بهینه دوربین برای نظارت ترافیک در شبکه جاده های شهری است. همه کاربران به کلاس های متعدد با توجه به درجه پذیرش از نظارت دوربین (ADOCM) تقسیم شده اند. مدل دو سطحي برنامه نویسی برای مشکل محل دوربین (CLP) معرفی شده است.هدف از مسئله سطح بالایی، به حداکثر رساندن مشاهده جریان ترافیك کل از نظر برنامه ریزان شبکه است. و مسئله سطح پایین تر به تصویر کشیدن مبتني بر لگاريتم از انتخاب مسير تصادفي كاربران است. روش میانگین های متوالي (MSA) و الگوریتم فرانک ولف برای حل این مسئله به كار رفته است.نمونه های عددی نشان می دهد، بینش مدیریتی دوربين هاي نظارت که رفتار در برابر دوربین های نظارت بر از دست دادن قابل توجه به نظارت ترافیک شبکه به ارمغان آورد.
شبیه سازی
مقدمه
یک شبیه سازی ترافیک (ATS) بسته توسعه یافته شبیه سازی میکروسکوپی ترافیک با استفاده از Visual C++ است.که قادر به تکثیر هزاران وسایل نقلیه این است ، که می تواند راه حل یا به عنوان عوامل راه حل تعیین شود، در حال اجرا بر روی یک شبکه طراحی شده جاده ها، چند خط تقاطع با درگیری های خودرو، چراغ های راهنمایی، حتی شبیه سازی میدان ها و تابلوهای راهنمایی وجود دارد، وسایل نقلیه می تواند به دنبال مدل های مختلف جریان ترافیک حرکت کند.
محیط نرم افزار
مایکروسافت ویژوال C + + 2008
طراحی ATS (نسخه روز به روز (Day-to-day version
در آغاز یک روز به صورت تصادفی مسافران از ریشه تولید می شود، و مسافران برآورد زمان سفر و/ یا کوتاه ترین مسیر را بر اساس تجارب انتخاب می کنند. مسافران در طول انتخاب کوتاه ترین مسیر با توجه به پیش بینی های خود حرکت می کنند. زمان ورود به عنوان مرجع مورد نیاز است و مسافران در مقصد قبل از رسیدن به زمان ورود نیاز دارند؛ .مسافران به دلیل تاخیر و دیرکرد مجازات نمی شوند. در پایان یک روز تمام مسافران به منظور ایجاد شرایط ترافیک مشابه در تمام طول روز پاک خواهند شد.
پروژه شبیه سازی شده
کد پروژه: 1030
موضوع:multiVariable و کنترل چندمتغیره و LQR و LQG و Kalman Filter فیلتر کالمن
شامل:پروِژه اصلی + فایل شبیه سازی با نرم افزار متلبMatlab +گزارش کامل از روند کار و نتایج شبیه سازی
عنوان پروژه:
طراحی کنترل کننده بهینه برای توربین ژنراتور
خلاصه:
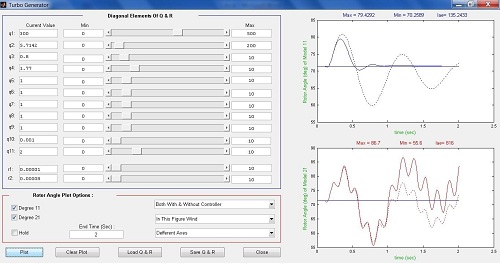
روند کلی
ما در اینجا یک سیستم مرتبه 11 (توربین- ژنراتور) داریم که میخواهیم بوسیله ی کنترل کننده LQR و همچنین با فیلتر کالمن کنترل کننده LQG را طراحی کنیم.
LQG=)LQR(Kf+)LQR(Kc
Kf: گین بهینه کالمن فیلتر
Kc: گین بهینه فیدبک
روند کار کنترل کننده LQG در شکل زیر دیده می شود:
این توربین- ژنراتور دارای پارامترهای زیر می باشد:
ما اینجا 13 پتانسیومتر در اختیار داریم که 11 تای آنها پارامترهای توربین- ژنراتور(که در بالا آمده است) و 2 تا هم ورودی است.
وظیفه طراح بدست آوردن RوQ بمنظور اهداف کنترلی مورد نظر می باشد که این اهداف عبارتند از:
ü کم کردن اولین نوسان(اورشوت Overshout)
ü بهبود میرایی سیستم
مهمترین پارامترها در مدل 11؛ q1,q2,q9می باشند؛ و ورودی r15تا 10برابر مهمتر از ورودی r2 است.
بوسیله ی روش سعی و خطا و تغییر پارامترها بهترین q و r ها را پیدا می کنیم(که روش پیدا کردن و نمودارهای آن در ادامه قرار داده شده است)
می دانیم که LQG:
LQG(A,B,C,Q,R,Qf,Rf)
که Qf,Rf مربوط به کالمن فیلتر می باشد که Kfرا می دهد.
Qf,Rf روی عملکرد سیستم تاثسر زیادی نمی گذارند؛ که هر چه Kf بزرگتر انتخاب شود سرعت تخمین بالا میرود ولی مصونیت در مقابل نویز پایین می آید به همین علت در حاشیه امنیت حرکت می کنیم و Kf را کم می کنیم تا نویز تاثیر نگذارد.
Rf=1 , Qf=0.1
حال کنترل کننده طراحی شده که بهینه ترین کنترل کننده برای مدل 11 است را بر روی مدل 21 اعمال می کنیم که نمودار حاصل آن نشان می دهد که مدل 21 بسمت بی نهایت می رود و ناپایدار می شود و علت این ناپایداری دینامیک های حذف شده مهم مدل 11 نسبت به مدل 21 است. که نشان می دهد LQG کنترل کننده خوبی نیست توان مقابله با عدم قطعیت را ندارد.
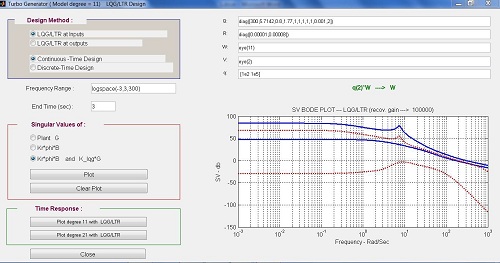
LQR و فیلتر کالمن (بعنوان سیستم فیدبک حالت تصور کنیم) دارای خواص عملکردی مناسبی می باشند؛ ولی نشان داده شد که کنترل LQG که ترکیب دو LQR فیدبک بهینه حالات و کالمن فیلتر می باشند دارای رباتسنس ضعیف و غیر قابل قبولی می باشد. حال به روش LTR که وادار می نماید که ماتریس گشن حلقه در LQG به ماتریس گین حلقه در LQR میل نماید؛ که بدنبال این هستیم که خواص رباتسنس از دست رفته LQR در LQG را بازیابی نماییم. بعبارت دیگر طراحی LQG/LTR همان طراحی LQG است که در آن کالمن فیلتر به شکل خاص زیر طراحی می شود:
L2(s)=-Kc(sI-A)-1B
L2(s)=KLQG(s)G(s)
نكات:
1) در اين پروژه ابتدا مختصري درباره LQR و LQG و فيلتر كالمن به صورت ساده و كلي توضيح داده شده است.
2) تمام مطالب ذكر شده با منبع مي باشند كه منبع هر مطلب به طور كامل مشخص شده است.
3) صحت مطالب منابع در اينجا مورد بررسي قرار نگرفته است.
4) همراه با اين فايل در CD ارائه شده فايل بعضي از منابع و مطالب مورد بررسي قرار گرفته وجود دارد.
5) چون چندين برنامه MATLAB براي اين پروژه وجود داشت سورس برنامه هم در CD قرار گرفته تا اعداد با همان برنامه تست شوند.
6) فايل pdf اين txt نيز در CD موجود است.
7) در اينجا فقط تعداد محدودي از نمودار ها طراحي آمده است.
8) اينجانب هيچ ادعايي براي درستي نتايج بدست آمده ندارم و فقط نظر خود را گفته ام.
9) کار اصلی پروژه در بخش های روند کلی و نمودارها و نتیجه گیری(5و6و7) می باشد.
10) بخش های 1تا 4 ترجمه و چکیده از زبان اصلی(انگلیسی ) می باشد؛ منابع آنها هم ذکر شده است.
11) پیشاپیش از هر گونه غلط املایی و اشتباهات بازگردانی متون از زبان اصلی عذر خواهم.
فهرست مطالب
1.1. LQR زمان پیوسته متناهی.................................................................................................................4
1.2. LQR زمان پیوسته نامتناهی .............................................................................................................5
1.3. LQR زمان گسسته متناهی ...............................................................................................................6
1.4. LQR زمان گسسته نامتناهی ............................................................................................................6
2.1. مشکلات LQR و LQG سنتی ..........................................................................................................8
2.2. فیدبک حالت مطلوب ..........................................................................................................................10
2.3. فیلتر کالمن ...........................................................................................................................................10
2.4. برآورد حالت مطلوب ترکیبی و فیدبک حالت مطلوب .................................................................11
کد پروژه:1040
موضوع: پايان نامه کارشناسي مهندسی برق- مخابرات
شامل: فایل گزارش 60 صفحه
مخابرات و ارتباطات سيار(موبایل) و شبکه GSM
چکیده
انسان از ابتدای خلقت خويش همواره به ارتباط با هم نوع نياز داشته و اين نياز در گذر سال ها و قرن ها بيشتر شده به صورتی که تبديل به يک ضرورت انکار پذير در زندگی انسان ها شده است و همين نياز باعث شده انسان به دستاوردهای بزرگی مانند پست، تلگراف، تلفن و اينترنت دست يابد و مطمئناً دستاوردهای بهتری نيز در آينده براساس همين نيازها به وجود خواهد آمد و در حقيقت جهان پهناور امروز به واسطه همين ارتباطات ايجاد شده به دهکده جهانی تبديل شده است. مخابرات سهم عظيم و به جرات می توان گفت بزرگترين سهم را در برقراری ارتباط بين انسان ها به عهده دارد، که به تنهايی شامل بخش ها و قسمت های مختلفی می باشد.
فهرست مطالب
فصل اول – مقدمه
فصل دوم- مخابرات و ارتباطات سيار
1. قسمتي ازتاريخچه مخابرات سيار
2. ارتباطات راديويي سيار
3. دلایل مطرح شدن سیستم های بی سیم
4. معرفي سيستم هاي سيار درجهان
فصل سوم –GSM
1. شبکه GSM
2. تکنولوژی GPRS
3. معماريشبکه GSM
4. مشخصات فرکانسی ونواحی شبکه GSM
5. مشخصات فرکانسی GSM
6. مدولاسیون
7. ظرفيت آنتن (TRX)
8. ساختار جغرافيايي شبكه
9. كانال هاي سيستم GSM
10. انتشار امواج رادیویی
11. پلاریزاسیون
12. Handover
13. درایوتست
14. مفاهيم امنيتي شبكه
فصل چهارم – سایت های شهری و بین شهری
1. BTS و متعلقات
2. دکل و متعلقات (TOWER)
3. آنتن و فیدر
4. رادیو
5. HDSL
6. کانکس و ساختمان
7. شارژر و باطری
8. گراند
9. تاسیسات
10. برق ورودی AC
نتيجه گيری
کد پروژه: 1034
موضوع: پايان نامه کارشناسي مهندسی برق- مخابرات
300 صفحه
کدگذاری و مدولاسیون فریم کانال برای تولید نسل دوم سیستم پخش تلویزیون دیجیتالی زمینی (DVB-T2)
Frame structure channel coding and modulation for a second generation digital terrestrial television broadcasting system (DVB-T2)
چکیده
این تحقیق درباره پخش زمینی تصاویر دیجیتالی DVB است که عمده کار روی نسل جدید این پخش یعنی DVB-T2 که امروزه در اروپا رواج دارد می باشد. در این پروژه ابتدا DVB-T2 و نحوه تولید سیگنال و نحوه انتشار آن و کد گذاری آن مورد بررسی قرار گرفته است. این قسمت براساس سند: Frame structure channel coding and modulation for a second generation digital terrestrial television broadcasting system (DVB-T2) (DVB Document A122r1) که منتشر شده در January 2008 می باشد. که این سند براساس استاندارد: ETSI SR 000 314 (European Telecommunications Standards Institute) که یک استاندارد اروپایی است، می باشد (موسسه استاندارد ارتباط از راه دور اروپا). پس از بررسی DVB-T2 لازم بود که این کدگذاری و مدولاسیون شبیه سازی شود که و ما قسمت های مختلف آن با استفاده برنامه مطلب پیاده سازی و شبه سازی کردیم که شبه سازی کانال آن و OFDM در دو فصل آخر آمده است.
کلمات کلیدی:
DVB-T2 – جداسازی – کدگذاری - مدولاسیون – سیگنالینگ - OFDM
فهرست مطالب
فصل1: هدف
فصل2: مزایا و معایب تلویزیون و گیرنده دیجیتال
فصل3: استانداردها و روش های پخش سیگنال تلویزیون دیجیتال
فصل4: ساختار سیستم DVB-T2 تلویزیون دیجیتال
فصل5: پردازش داخلی
فصل6: کد گذاری و مدولاسیون بیت جداسازی
فصل7: تولید، کدگذاری و مدولاسیون لایه-1 (L1) در حال انتقال
فصل8: سازنده قاب Frame Builder در تلویزیون دیجیتال
فصل9: تولید OFDM تلویزیون دیجیتال
فصل10: مشخصات طیفی
فصل11: پیاده سازی کد اجرایی کانال DVB-T در matlab
فصل12: طراحی و شبیه سازی سیگنال ODFM در matlab
منابع
حل تمرین
کد پروژه:1033
موضوع: پروژه درس VLSI
حل تمرین 10 صفحه 342 با نرم افزار LEdit و PSpice همراه با فایل های شبیه سازی در دو نرم افزار LEdit و PSpice
حل معادلات
کد پروژه:1031
موضوع: پروژه درس ریاضی مهندسی پیشرفته
حل معادلات مشتقات جزئی با نرم افزار MATLAB
1- حل معادله سهموی Parabolic Equation Solving
2- حل معادله هذلولی(هایپربولیک) hyperbolic Equation Solving
3- حل معادله بیضوی Elliptic Equation Solving
4- حل معادله خطی واگرای ut+C-2uxxx=0
5- حل مسئله solition دوتایی
6- حل 2 مرتبه ای انتشار همرفت solving a 2nd-order convection-diffusion
فهرست
1- حل معادله سهموی Parabolic Equation Solving 4
1-1 معادله حرارت 4
1-1-1 جوابهای بنیادین 5
2-1 کد های متلب 5
3-1 توضیح برنامه 7
4-1 خروجی برنامه7
2- حل معادله هذلولی(هایپربولیک) hyperbolic Equation Solving 9
1-2 معادله موج 9
1-1-2 معادله درجهٔ اول موج 10
2-1-2 جوابها 10
2-2 کدهای متلب 10
3-2 خروجی برنامه 12
3- حل معادله بیضوی Elliptic Equation Solving 14
1-3 معادله لاپلاس 14
1-1-3 تعریف 14
2-1-3 شرایط مرزی 15
3-1-3 معادلات لاپلاس در دو بعد 16
1-3-1-3 توابع تحلیلی 16
2-3-1-3 شارش سیال 17
3-3-1-3 الکترواستاتیک 18
4-1-3 معادله لاپلاس در فضای سه بعدی 19
1-4-1-3 جواب بنیادی 19
2-4-1-3 تابع گرین 20
2-3 کدهای متلب 21
1-2-3 کد اصلی 21
2-2-3 کد برنامه های وابسته (function) 22
3-3 توضیح برنامه 23
4-3 خروجی برنامه 24
4- حل معادله خطی واگرای ut+C-2uxxx=0 25
1-4 کدهای متلب 25
1-1-4 کد اصلی 25
2-1-4 کد برنامه های وابسته (function) 27
2-4 توضیح برنامه 29
1-2-4 تعیین شرایط اولیه 30
2-2-4 نوشتن حل تحلیلی 30
3-4 خروجی برنامه 31
5- حل مسئله solition دوتایی 32
1-5 کدهای متلب 32
1-1-5 کد اصلی 32
2-1-5 کد برنامه های وابسته (function) 34
2-5 توضیح برنامه. 39
3-5 خروجی برنامه40
6- حل 2 مرتبه ای انتشار همرفت solving a 2nd-order convection-diffusion 41
1-6 کدهای متلب 41
1-1-6 برنامه اصلی 41
2-1-6 کد برنامه های وابسته(function) 42
2-6 خروجی برنامه 47
مقاله شبیه سازی شده
کد پروژه: 1012
موضوع:اجرای الگوریتم WK-means
شامل: فایل شبیه سازی با نرم افزار متلبMatlab
عنوان مقاله:
اجرای الگوریتم wk means در متلب روی دیتاست
مقاله شبیه سازی شده
کد پروژه: 1041
موضوع:سنکرون سازی آشوبی
شامل:مقاله اصلی + فایل شبیه سازی با نرم افزار متلبMatlab
عنوان مقاله:
EndNote
T. Ren, et al., "The Bidirectional Coupled Synchronization of Chaotic System Using Finite-time Control," in Chaos-Fractals Theories and Applications (IWCFTA), 2012 Fifth International Workshop on, 2012, pp. 278-282.
In this paper, the finite-time control method is proposed to achieve synchronization based on bidirectional coupled chaotic systems. The stability criteria is presented for error system based on Lyapunov method. Compared to other results, the proposed controller is simpler and the new nonlinear system is considered which is consisted of the chaos system and the finite time controller. The Wolf method is used to calculate the largest Lyapunov exponent which shows that the controlled chaos system remains chaotic features. Simulation results for Lorenz system are presented to illustrate the effectiveness of the finite-time synchronization control scheme
Lyapunov methods; chaos; control system synthesis; nonlinear control systems; stability; synchronisation
مقاله شبیه سازی شده
کد پروژه: 1520
موضوع: شبکه های کامپیوتری
شامل: فایل شبیه سازی + پایان نامه + فایل ارائه ppt
عنوان:
شبیه سازی مسیریابی خودکار شبکه های توروس
مقاله شبیه سازی شده
کد پروژه:1518
موضوع: Data Miningداده کاوی
شامل: فایل Word ترجمه + شبیه سازی با وکا
A best-first multivariate decision tree method used for urban land cover classification
Address: ieeexplore
EndNote
W.-t. Cai, et al., "A best-first multivariate decision tree method used for urban land cover classification," in Geoinformatics, 2010 18th International Conference on, 2010, pp. 1-5.
Abstract
Nowadays China has speeded up urbanization, urban land use occurred in areas of significant change. In order to obtain land cover information speedily and correctly, many methods from data mining are used to classify the remote sensing image. In recent years, using decision trees (DTs) to classify remotely sensed data has increased, due to the algorithm running fast and making no statistical assumptions. While in remotely sensed data, the classification borders of topographic features are often not parallel with the feature space axes. So it will result in a large decision tree and poor generalization to the unobserved instances, if we use univariate DT method which tests a single feature at a node and splits the instance space with borders parallel with the features'. Aiming at the defect of univariate DT method, in this paper, principal component analysis-based approach and “best-first” method which is superior to the depth-first method that standard DT learners used are combined to construct a multivariate DT in which each tree node test can be based on one or more of the input features. In order to construct a good multivariate DT, the following issues are considered in this paper: calculating features for classification, determining the best feature space dimension, and avoiding overfitting the training data. In this study, separate test and training data sets from multispectral Landsat TM are used to evaluate the performance of univariate and multivariate DT for land cover classification. Evaluation factors considered are: the training data set size, the final tree size built by DT algorithms and algorithms classification accuracy. When compared our multivariate method with C4.5, a univariate DT algorithms, the experiments confirm that the multivariate DT builds a pithiness tree and generally improves the accuracy of the resulting DT over a univariate tree.
Keywords
data mining; decision trees; geophysical techniques; principal component analysis; remote sensing; terrain mapping; topography (Earth)
گزارش و ترجمه
کد پروژه:1517
موضوع: پروژه درس ریاضی مهندسی پیشرفته
مدلN – gram
شامل: گزارش پروژه
خلاصه:
مدلn-gram یکی از مدل های مدلسازی زبان طبیعیست. در این مدل، از آمار کلاسیک و احتمال بهره گرفته شده است. فرض کنید که یک سری اشیا یا نشانه ها و یا هر چیز دیگری داشته باشیم. هر کدام از این ها را به صورت یک رأس در گراف تصور کنید که می تواند به رأس دیگری یال جهت دار داشته باشد. این یال جهت دار، نشان دهنده یک نوع رابطه است که با توجه به مورد دلخواه ما می تواند معانی متفاوتی داشته باشد. مثلاً در مورد زبان، می تواند توالی دو کلمه باشد (اگر کلمه ای بعد از کلمه دیگری بیاید، یک یال از اولی به دومی وجود دارد). به یک توالی n تایی از این رأس ها، n-gram می گوییم (توالی های 3-gram ، 2-gram و ... داریم). در این مدل، یک مجموعه داده های آماری بسیار بزرگ نیاز داریم که هر کدام مجموعه ای از این نشانه ها به همراه روابط بین آن ها است. برای مثال، در مورد یک زبان خاص، یک سری متن به آن زبان می باشد. حال، روابطی در این مدل تعریف می شود که می توان با استفاده از آن، درستی یک توالی خواص از این نشانه ها را بررسی کرد.
شبیه سازی
کد پروژه:1516
موضوع: پروژه درس پایگاه داده پیشرفته
شبیه سازی OPTIMIZATION در پایگاه داده به زبان #C و SQL
مراحل کار:
ü ساختن درخت با توجه به رشته ورودی
ü بهینه سازی ( ترکیب وقرار دادن درمحل مناسب)
ü بهینه سازی projectionها ( ترکیب وقرار دادن درمحل مناسب)
ü ترسیم درخت بهینه شده
ü نوشتن Query بهینه شده
مقاله شبیه سازی شده
کد پروژه:1514
موضوع: طراحی فیلتر دیجیتال(signe_digital_filter)
شامل:فایل شبیه سازی با نرم افزار modelsim+ فایل برنامه نویسی با Xilinx
مقاله شبیه سازی شده
کد پروژه:1511
موضوع: پروژه درس سیستم عامل پیشرفته و سیستم عامل
طراحی و پیاده سازی دامنه های پویا در جهت دسترسی به منابع سیستم عامل با زبان C#
شامل:فایل شبیه سازی با نرم افزار C#+ گزارش شبیه سازی
خلاصه:
این پروژه طراحی و شبیه سازی یک محیط است که در آن بسته به نیاز منابع فعال؛ دامنه ها به صورت پویا ایجاد شوند و در عین حال یکتا باشند یعنی دامنه مشابه وجود نداشته باشد و همچنین دامنه ها دارای قابلیت استفاده مجدد باشند.
این شبیه سازی به زبان برنامه نویسی C# انجام شده است. و به همراه فایل های شبیه سازی و فایل Word می باشد.
در سیستم عامل موضوعات مختلف (Subject) سعی در استفاده از اشیای (Object) مختلف دارند. میتوان گفت موضوعات موجودیت های فعال بوده که قصد دارند بر روی اشیایی که در واقع منابع و موجودیت های غیرفعال هستند؛ مجموعه ای از عملیات دسترسی مانند خواندن؛ نوشتن و اجرا و... را انجام دهند. دامنه ها (Domain) در واقع مجموعه ای از اشیا و حقوق دستیابی که برای آن اشیا وجود دارد تعریف شده است.
ورودی برنامه: یک فایل متنی که در آن داده های بصورت Accesss Right,Object,Subject و وضعیت درخواست(حدف یا اضافه) می باشد.
مقاله شبیه سازی شده
کد پروژه:1513
موضوع: :طراحی و پیاده سازی مدارات Mealy & Moor
شامل:فایل شبیه سازی با نرم افزار modelsim+ فایل برنامه نویسی با Xilinx
مقاله شبیه سازی شده
کد پروژه:1512
موضوع:
FPGA Realization using CORDIC Algorithm
پیاده سازی الگوریتم های سینوس-کسینوس و ... به زبان vhdl در نرم افزار Xilinx
شامل:فایل شبیه سازی با نرم افزار modelsim+ فایل برنامه نویسی با Xilinx
گروه فنی مهندسی پندار متشکل از فارغ التحصیلان ارشد و دکترا دانشگاههای معتبر می باشند و کلیه پروژه های درسی؛ سمینار و پایان نامه رشته های برق و کامپیوتر انجام می دهیم.
راه ارتباطی:
ایمیل: edit.paper.isi@gmail.com
شماره تماس : 09384118561
برای سفارش پروژه با شماره زیر تماس یا میل بزنید.
ایمیل: edit.paper.isi@gmail.com
شماره تماس : 09384118561
مقاله شبیه سازی شده
کد پروژه:1510
موضوع: پروژه درس شبکه های کامپیوتری و شبکه های کامپیوتری پیشرفته
تحقیق جامع شبکه های حسگر بیسیم WSN
Wireless Sensor Actor Network
شامل:فایل تحقیقی شامل 130 صفحه به فرمت پایان نامه + پاور پوینت 101 اسلایدی+ پاورپوینت 31 اسلایدی برای ارائه
خلاصه:
در این تحقیق از 29 منبع(مقاله و کتاب) استفاده شده است و شبکه های حسگر بیسیم از جنبه های مختلفی بررسی شده است.
در صورت نیاز داشتن میتوانید ایمیل بزنید و فهرست مطالب یا فهرست منابع و ماخذ برایتان ارسال شود.
فهرست مطالب به شکل کلی عبارت است از:
مقدمه
فصل اول
معرفی شبکه حسگر / ساختار كلي شبكه حسگر بي سيم/ ساختمان گره / ويژگي های شبکه حسگر / كاربردهای شبکه حسگر بیسیم / پشته پروتكلي / موضوعات مطرح در طراحی شبکه های حس / نمونه ی پیاده سازی شده شبکه حس
فصل دوم
انواع الگوريتم هاي مسيريابي / مدل هاي مسيريابي / معرفي انواع الگوريتم هاي همزمان سازي / RBS/ LTS / همزمان سازي PAIR – WISE/ TPSN /T-SYCH / PASSIVE CLUSTER BASED SYNCHRONIZATION FOR WSN/ TS/MS/UND – RTIP / IBS / FTSP
فصل سوم
معرفی خوشه بندی/اهداف اصلی و چالش های طراحی خوشه بندی در WSN ها/ دسته بندی الگوریتم های خوشه بندی / پارامترهای خوشه بندی / طبقه بندی پروتکل های خوشه بندی
فصل چهارم
سلسله مراتب خوشه بندی تطبیق پذیر کم انرژی ( LEACH ) / الگوریتم خوشه بندی جدید برمبنای LEACH مبتنی بر تعویض سرخوشه برای شبکه های حسگر بی سیم/انتخاب پوياي سرخوشه با توازن انرژي در شبکه هاي سنسور بي سيم ناهمگن/یک الگوریتم موثر خوشه بندي مبتنی بر HAC براي شبکه هاي حسگر بی سیم /خوشه بندي خود سازمانده حسگرها با ايستگاه اصلي متحرك در شبكه هاي حسگر بي سيم به كمك منطق فازي و الگوريتم ژنتيك / اتوماتاهاي يادگير سلولي / خوشه بندی با استفاده از الگوریتم ژنتیک / کاربرد الگوریتم ژنتیک در خوشه بندی شبکه های حسگر بی سیم / خوشه بندي شبکه حسگر بي سيم بر مبناي الگوريتم بهينه سازي دسته اي ذرات به منظور کاهش مصرف انرژي / خوشه بندی پویای سه سطحی / پروتکل مسیریابی سلسله مراتبی مبتنی بر خوشه
منابع و مآخذ
 گروه فنی و مهندسی پندار
گروه فنی و مهندسی پندار