1030- طراحی کنترل کننده بهینه برای توربین ژنراتور
پروژه شبیه سازی شده
کد پروژه: 1030
موضوع:multiVariable و کنترل چندمتغیره و LQR و LQG و Kalman Filter فیلتر کالمن
شامل:پروِژه اصلی + فایل شبیه سازی با نرم افزار متلبMatlab +گزارش کامل از روند کار و نتایج شبیه سازی
عنوان پروژه:
طراحی کنترل کننده بهینه برای توربین ژنراتور
خلاصه:
روند کلی
ما در اینجا یک سیستم مرتبه 11 (توربین- ژنراتور) داریم که میخواهیم بوسیله ی کنترل کننده LQR و همچنین با فیلتر کالمن کنترل کننده LQG را طراحی کنیم.
LQG=)LQR(Kf+)LQR(Kc
Kf: گین بهینه کالمن فیلتر
Kc: گین بهینه فیدبک
روند کار کنترل کننده LQG در شکل زیر دیده می شود:
این توربین- ژنراتور دارای پارامترهای زیر می باشد:
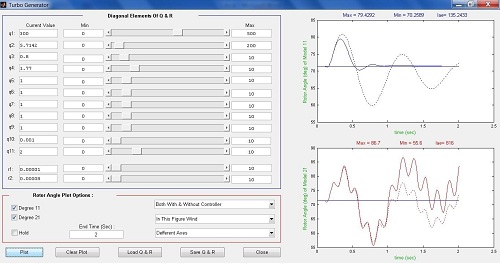
ما اینجا 13 پتانسیومتر در اختیار داریم که 11 تای آنها پارامترهای توربین- ژنراتور(که در بالا آمده است) و 2 تا هم ورودی است.
وظیفه طراح بدست آوردن RوQ بمنظور اهداف کنترلی مورد نظر می باشد که این اهداف عبارتند از:
ü کم کردن اولین نوسان(اورشوت Overshout)
ü بهبود میرایی سیستم
مهمترین پارامترها در مدل 11؛ q1,q2,q9می باشند؛ و ورودی r15تا 10برابر مهمتر از ورودی r2 است.
بوسیله ی روش سعی و خطا و تغییر پارامترها بهترین q و r ها را پیدا می کنیم(که روش پیدا کردن و نمودارهای آن در ادامه قرار داده شده است)
می دانیم که LQG:
LQG(A,B,C,Q,R,Qf,Rf)
که Qf,Rf مربوط به کالمن فیلتر می باشد که Kfرا می دهد.
Qf,Rf روی عملکرد سیستم تاثسر زیادی نمی گذارند؛ که هر چه Kf بزرگتر انتخاب شود سرعت تخمین بالا میرود ولی مصونیت در مقابل نویز پایین می آید به همین علت در حاشیه امنیت حرکت می کنیم و Kf را کم می کنیم تا نویز تاثیر نگذارد.
Rf=1 , Qf=0.1
حال کنترل کننده طراحی شده که بهینه ترین کنترل کننده برای مدل 11 است را بر روی مدل 21 اعمال می کنیم که نمودار حاصل آن نشان می دهد که مدل 21 بسمت بی نهایت می رود و ناپایدار می شود و علت این ناپایداری دینامیک های حذف شده مهم مدل 11 نسبت به مدل 21 است. که نشان می دهد LQG کنترل کننده خوبی نیست توان مقابله با عدم قطعیت را ندارد.
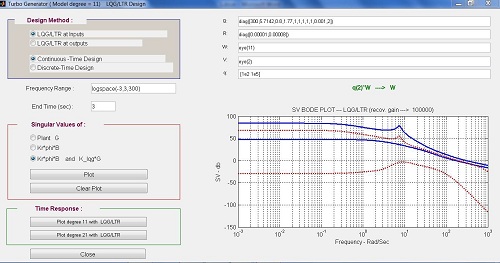
LQR و فیلتر کالمن (بعنوان سیستم فیدبک حالت تصور کنیم) دارای خواص عملکردی مناسبی می باشند؛ ولی نشان داده شد که کنترل LQG که ترکیب دو LQR فیدبک بهینه حالات و کالمن فیلتر می باشند دارای رباتسنس ضعیف و غیر قابل قبولی می باشد. حال به روش LTR که وادار می نماید که ماتریس گشن حلقه در LQG به ماتریس گین حلقه در LQR میل نماید؛ که بدنبال این هستیم که خواص رباتسنس از دست رفته LQR در LQG را بازیابی نماییم. بعبارت دیگر طراحی LQG/LTR همان طراحی LQG است که در آن کالمن فیلتر به شکل خاص زیر طراحی می شود:
L2(s)=-Kc(sI-A)-1B
L2(s)=KLQG(s)G(s)
نكات:
1) در اين پروژه ابتدا مختصري درباره LQR و LQG و فيلتر كالمن به صورت ساده و كلي توضيح داده شده است.
2) تمام مطالب ذكر شده با منبع مي باشند كه منبع هر مطلب به طور كامل مشخص شده است.
3) صحت مطالب منابع در اينجا مورد بررسي قرار نگرفته است.
4) همراه با اين فايل در CD ارائه شده فايل بعضي از منابع و مطالب مورد بررسي قرار گرفته وجود دارد.
5) چون چندين برنامه MATLAB براي اين پروژه وجود داشت سورس برنامه هم در CD قرار گرفته تا اعداد با همان برنامه تست شوند.
6) فايل pdf اين txt نيز در CD موجود است.
7) در اينجا فقط تعداد محدودي از نمودار ها طراحي آمده است.
8) اينجانب هيچ ادعايي براي درستي نتايج بدست آمده ندارم و فقط نظر خود را گفته ام.
9) کار اصلی پروژه در بخش های روند کلی و نمودارها و نتیجه گیری(5و6و7) می باشد.
10) بخش های 1تا 4 ترجمه و چکیده از زبان اصلی(انگلیسی ) می باشد؛ منابع آنها هم ذکر شده است.
11) پیشاپیش از هر گونه غلط املایی و اشتباهات بازگردانی متون از زبان اصلی عذر خواهم.
فهرست مطالب
- کنترل کننده LQR........................................................................................................................................4
1.1. LQR زمان پیوسته متناهی.................................................................................................................4
1.2. LQR زمان پیوسته نامتناهی .............................................................................................................5
1.3. LQR زمان گسسته متناهی ...............................................................................................................6
1.4. LQR زمان گسسته نامتناهی ............................................................................................................6
- کنترل کننده LQG .......................................................................................................................................7
2.1. مشکلات LQR و LQG سنتی ..........................................................................................................8
2.2. فیدبک حالت مطلوب ..........................................................................................................................10
2.3. فیلتر کالمن ...........................................................................................................................................10
2.4. برآورد حالت مطلوب ترکیبی و فیدبک حالت مطلوب .................................................................11
- خصوصیات robustness ..........................................................................................................................11
- فیلتر کالمن .....................................................................................................................................................12
- روند کلی ..........................................................................................................................................................13
- نمودارها ............................................................................................................................................................16
- نتیجه گیری ....................................................................................................................................................28
- منابع .................................................................................................................................................................29
 گروه فنی و مهندسی پندار
گروه فنی و مهندسی پندار